





-

北云发布组合导航芯片 智能汽车厘米级定位成本降低30倍
(文 | 车东西)北云科技A1高精度组合导航模组仅3980元起
-
北云科技携手EPSON推出高精度组合导航系统X1
近日,爱普生(中国)有限公司(EPSON)宣布与国内高精度定位核心部件制造商北云科技(bynav)达成合作。
-
北云科技与ADI合作推出高精度组合导航板卡,加速自动驾驶系统的商业化进程
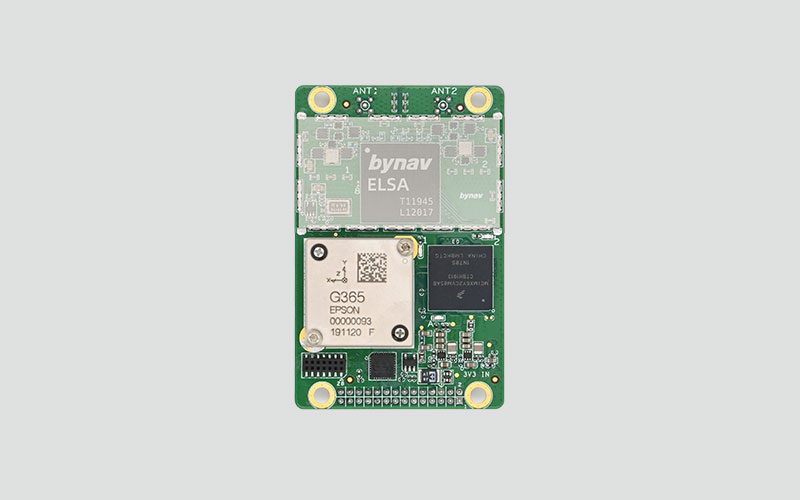
全球领先的高性能模拟技术公司ADI与国内高精度定位核心部件制造商北云科技(bynav)宣布达成合作。在这项合作中,北云科技将GNSS高精度定位芯片与ADI的小型化MEMS惯性测量单元(IMU)相结合,面向自动驾驶行业推出了一款小尺寸高精度组合导航板卡——A1,能够为自动驾驶系统提供可靠的厘米级位置及三维姿态信息。
功能特点
- 小尺寸低功耗,46mmx71mm,1.95w
- 深耦合 GNSS+INS 组合导航引擎
- 支持双天线定向与静态/低速对准
- 全系统全频点(含北斗3)*
- 工业级 IMU 模块,陀螺零偏1.23deg/h或
- 支持串口、以太网、CAN 等多种接口
- 支持 GNSS/IMU 原始数据输出与后处理
- 定位延迟<5ms,支持125Hz输出频度
备注:*表示选配