by  Hana
Hana
From the "depth" of the interaction and for the shared information between the GNSS and INS systems, there are three common strategies of the current GNSS/INS integration: loose coupling, tight coupling and deep coupling, and the implementation difficulty increases in order.
The loose coupling uses RTK positioning results + IMU raw data to integrate. The raw GNSS measurement and the IMU data are independently processed and then blended together through KF. In scenarios where there is satellite signal but the signal is obstructed, such as urban canyon and foliage canopy, the positioning accuracy is not as good as tight coupling and deep coupling.
The tight coupling uses RTK positioning results + GNSS raw data + IMU raw data. It can effectively use the satellite observation data under GNSS signal blockage to improve the positioning accuracy. The tightly coupled algorithms requires the GNSS/INS manufacturers to have both R&D capabilities of RTK positioning algorithm and GNSS/INS algorithm.
However, the tightly coupled algorithm still cannot achieve the best results when the GNSS raw data is of poor quality. In fact, in harsh environments such as urban canyon and foliage canopy, GNSS is prone to frequent loss of signal and observation slips, which can easily cause abnormal positioning results. The deep-coupled integrated navigation algorithm can effectively solve this problem.
Based on the tight coupling algorithm, the deep coupling algorithm uses IMU raw data to assist GNSS signal acquisition and tracking, and assist the carrier tracking loop through the accurate relative Doppler change information of the IMU to improve the accuracy of Doppler estimation in harsh environments, thereby improving the accuracy and continuity of observations such as carrier phase and pseudo-range in harsh environments, as well as reducing the interruption and slips of the GNSS observations, thereby effectively improving the accuracy and reliability of the GNSS/INS position. In addition, the deep coupling algorithms can be used to effectively detect spoofing signals and protect GNSS/INS device from interference.
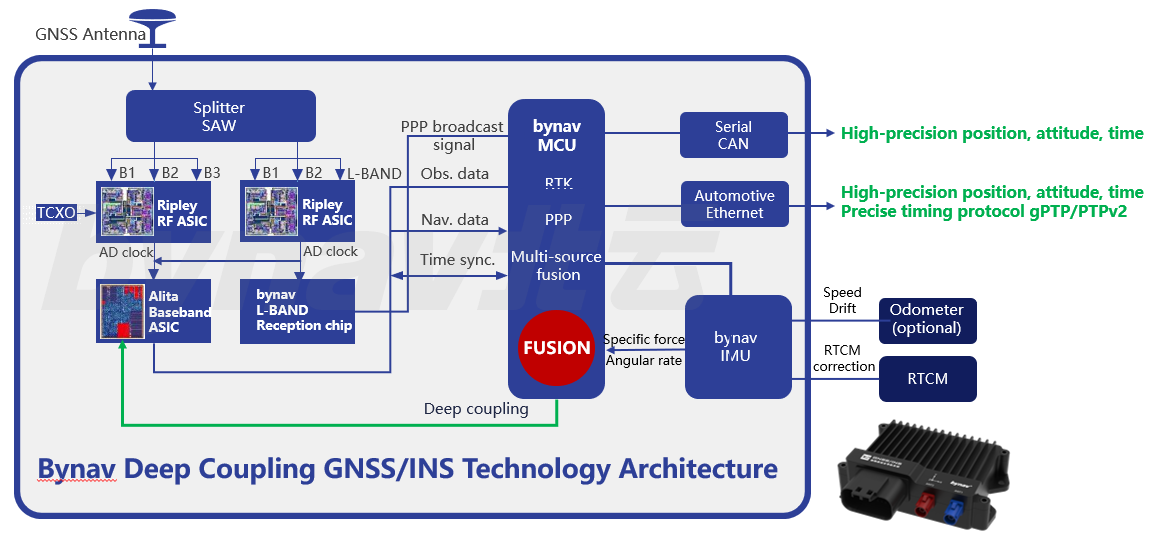
The deep coupling algorithm is the most difficult to implement, but it shows the superior positioning performance in the urban canyon. It requires not only the tightly coupled algorithm development capability, but also the GNSS RF & baseband reception capability. At present, only companies with self-developed RTK chips master this technology. Bynav automotive-grade X2 GNSS/INS positioning unit is based on in-house developed RTK positioning chip and integrated with deep-coupled GNSS/INS algorithm. The test results show that deep-coupling can improve positioning accuracy 3-7 times higher than loose-coupling, and 2~5 times higher than tight coupling.
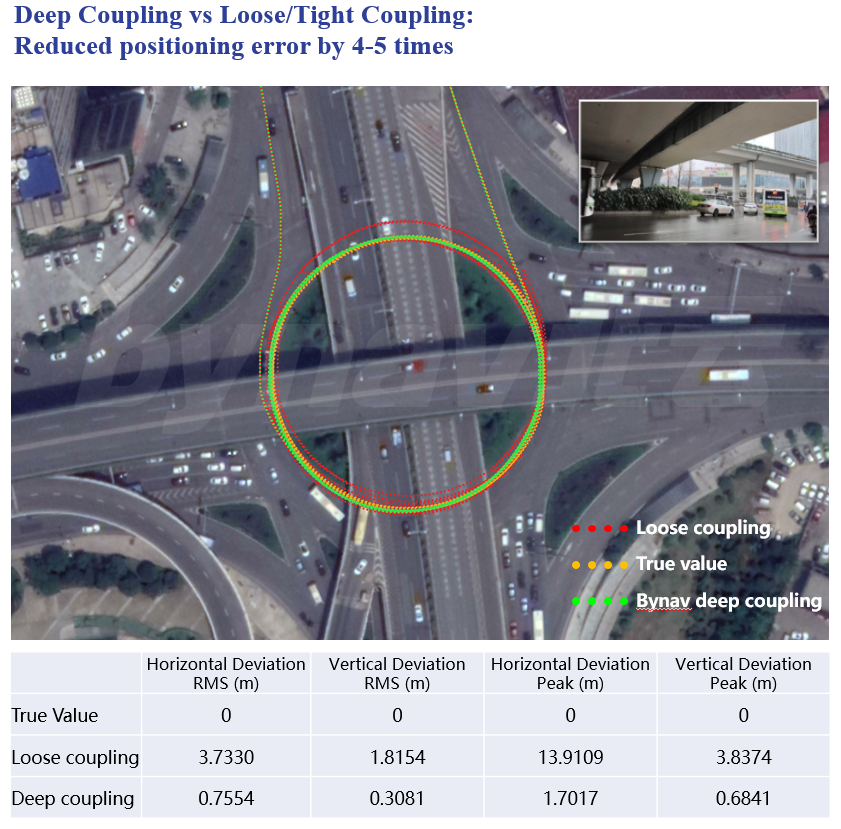
Deep coupling performance in the test
In this road section, the fixed solution percentage is 15.18%, and 76.34% of the number of satellites tracked is not less than two. Loose coupling mainly uses RTK fixed solutions, and deep coupling can use the observation data when the number of satellites is more than two.
The test shows that in harsh environments such as elevated roads, deep-coupled positioning can reduce the error by 3-7 times compared with loosely-coupled positioning.